Tutorial PyTorch: Perceptron Multi-Capa (MLP)
Red Neuronal Artificial
Basado en el blog ejemplo de regresión lineal, pytorch tutorial
Mariano Rivera
agosto 2020
PyTorch es una librería de alto nivel (similar a TensorFlow) para implementar Redes Neuronales Artificiales y ha ganado mucha popularidad entre los investigadores y desarrolladores que desean tener mas control solo la ceración, y entrenamiento de la red. Por ello, incluimos en varias secciones ejemplos de redes implementadas en PyTorch.
Para implementar un Perceptrón multicapa en PyTorch, seguiremos los siguientes pasos:
-
Importar librerias.
-
Preparar el conjunto de datos. Leeremos los datos de MNIST
-
Crear la RNA.
-
Instanciar la clase Modelo
-
Instanciar la función de pérdidad de la red. dado que implementaremos un clasificador multiclase, la fucnión de pérdida sera la cross-entropía (entropía cruzada) y que incluye la función
softmax, por lo que no la prondremos en nuestro modelo. -
Instanciar el Optimizador. Usaremos como algoritmo de entrenamiento (optimización) el Descenso de Gradiente Estócastico con acelaración de Nesterov.
-
Entrenar el modelo.
-
Realizar predicción (inferencia) para medir la eficiencia.
Importar librerias
import numpy as np
import matplotlib as plt
import os
from sklearn.model_selection import train_test_split
import torch
import torch.nn as nn
import torchvision.transforms as transforms
from torch.autograd import Variable
import torchvision.datasets as datasets
torch.__version__
'1.3.1'
use_cuda = torch.cuda.is_available()
use_cuda
True
Dado que tenemos una GPU disponible, implementaremos una MLP con varias capas ocultas. Nos servirá para ilustrar:
-
Pasar el modelo y variables a GPU (en Keras esto es automático si contamos con un GPU y usamos Tensorflow-GPU).
-
Recuparar variables de espacio del GPU al espacio del CPU.
-
Usar varias funciones de activación, como la ahora popular ELU.
Preparar el conjunto de datos
Carga datos, los pasa a Tensor (variable de pytorch) y los normaliza usando
mean = (0.5,)
std = (1.0,)
datapath = './data'
trans = transforms.Compose([transforms.ToTensor(), transforms.Normalize(mean, std)])
train = datasets.MNIST(root=datapath, train=True, download=True, transform=trans)
test = datasets.MNIST(root=datapath, train=False, download=True, transform=trans)
print('Número de datos de entrenamiento: {} \nNúmero de datos de prueba: {}'.format(len(train), len(test)))
Número de datos de entrenamiento: 60000
Número de datos de prueba: 10000
Definimos el directorio donde los datos se localizán (o se localizarán en caso de que no estén disponibles aun, para descargarlos en tal caso usamos download=True). Los datos no son transformados al descargarse.
Cargador de Datos (data loader)
batch_size = 100
n_iters = 80000
num_epochs = int( n_iters / (len(train) / batch_size) )
train_loader = torch.utils.data.DataLoader(dataset = train,
batch_size = batch_size,
shuffle = True)
test_loader = torch.utils.data.DataLoader(dataset = test,
batch_size = batch_size,
shuffle = False)
Crear la RNA
La RNA se define como una clase, ANNModel en este caso.
En el constructor __init__ se definen las capas de las cuales constará el modelo, aunque no la forma en que se interconectan.
La interconección de las capas se especifica en el método forward.
Note que la capa no lineal definida por
(1)
se implementa en dos pasos:
- La parte lineal
(2)
- La activación no-lineal
(3)
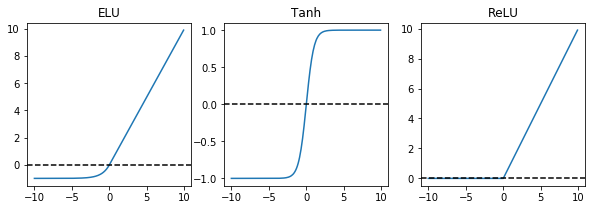
En el modelo usaremos 3 capas acultas y, para propositos de ilustración, con activaciones ReLU, Tanh y ELU.
ELU
ReLU
import matplotlib.pyplot as plt
import numpy as np
def miReLU(x, alpha=1.):
return x*(x>0)
def miELU(x, alpha=1.):
y = alpha*(np.exp(x)-1)
return x*(x>0) + y*(y<0)
x = np.array(range(-100,100))/10.
yReLU = miReLU(x)
yELU = miELU(x)
yTanh = np.tanh(x)
plt.figure(figsize=(10,3))
plt.subplot(131)
plt.plot(x, yELU)
plt.axhline(0, linestyle='--', color='k')
plt.title('ELU')
plt.subplot(132)
plt.plot(x, yTanh)
plt.axhline(0, linestyle='--', color='k')
plt.title('Tanh')
plt.subplot(133)
plt.plot(x, yReLU)
plt.axhline(0, linestyle='--', color='k')
plt.title('ReLU')
plt.show()
Clase MLPnet
Aqui definimos la red neuronal que usaremos, sera un Perceptrón Multi-Capa (MLP):
-
En el método constructor
__init__definimos los componentes de nuestro MLP, note que la calaLinearno incluye la función de activación, por lo que ésta debe aplicarse como una capa extra. Por claridad, hemos definido las capas en el order que se usaran en nuestro modelo secuancial, pero esto no es obligatorio -
El método
forwarddefine el la secuancia de cálculos desde la entrada hasta la salida que realiza el MPL. -
En método
backwarddefini los cálculos de la retropagación requeridos desde la salida hacia cada variable respecto a la cual se entrena la red. Si todos las capas componentes enforwardson diferenciables (tienen su propio metodobackward, entonces el backward se define automáticamente por la secuencia inversa de losbackwardde cada capa segun se invocaron enforward.
Si deseamos crear una nueva capa o función de activación debemos crear una clase con los 'metodos: __init__, forwardy backward. Todas las capas de PyTorch inlcuyen ya esos métodos,. Pero es importante tenerlo en cuenta para implementar nustroas pripoas capas (custom layer).
- En nuetro MLP no uinlcuimos una función de actiovación
softmaxa la salida porque emplearemos como función de pérdida laCrossEntropyLoss()que ya incluye la activaciónsoftmax. Esto no es igual en Keras, donde explicitamente requerimos poner la activaciónsoftmaxa la salida de una red clasificadora multiclase.
class MLPnet(nn.Module):
def __init__(self, input_dim, hidden_dim, output_dim):
super(MLPnet, self).__init__()
'''
El método init define las capas de las cuales constará el modelo,
aunque no la forma en que se interconectan
'''
# Función lineal 1: 784 --> 100
self.fc1 = nn.Linear(input_dim, hidden_dim)
# Activación no lineal 1: 100 -->100
self.relu1 = nn.ReLU()
# Función lineal 2: 100 --> 100
self.fc2 = nn.Linear(hidden_dim, hidden_dim)
# Activación no lineal 1: 100 -->100
self.tanh2 = nn.Tanh()
# Función lineal 3: 100 --> 100
self.fc3 = nn.Linear(hidden_dim, hidden_dim)
# Activación no lineal 3: 100 -->100
self.elu3 = nn.ELU()
# Función lineal 3: (Capa de salida): 100 --> 10
self.fc4 = nn.Linear(hidden_dim, output_dim)
def forward(self, x):
x = x.view(-1, input_dim) # aqui convertimos la imagen a un vector unidimensional
# Capa 1
z1 = self.fc1(x)
y1 = self.relu1(z1)
# Capa 2
z2 = self.fc2(y1)
y2 = self.tanh2(z2)
# Capa 3
z3 = self.fc3(y2)
y4 = self.elu3(z3)
# Capa 4 (salida)
out = self.fc4(y4)
return out
def name(self):
return "MLP"
Crear instancia (modelo) de la clase RNA
input_dim = 28*28 # 784 número de pixeles
hidden_dim = 150 # número de neuronas en las capas ocultas
output_dim = 10 # número de etiquetas
model = MLPnet(input_dim, hidden_dim, output_dim)
En caso de que dispongamos de un GPU, pasamos el modelo al espacio de cálculo de la GPU.
if use_cuda:
model = model.cuda()
Crear instancia de la función de pérdida
Dado que es clasificacion usamos la entropía cruzada
error = nn.CrossEntropyLoss()
Crear instancia del Optimizador
Usamos Descenso de gradiente estocástico (Stochastic Gradient Descent, SGD).
learning_rate = 0.02
optimizer = torch.optim.SGD(model.parameters(), lr=learning_rate)
Entrenar el modelo
Entrenar la red model minimizando la función de pérdida error con el optimizador optimizer
loss_list = []
iteration_list = []
accuracy_list = []
accuracy_list_val = []
for epoch in range(num_epochs):
total=0
correct=0
# - - - - - - - - - - - - - - -
# Entrena la Red en lotes cada época
# - - - - - - - - - - - - - - -
for i, (images, labels) in enumerate(train_loader):
if use_cuda: # Define variables
images, labels = images.cuda(), labels.cuda()
images = Variable(images)
labels = Variable(labels)
optimizer.zero_grad() # Borra gradiente
outputs = model(images) # Propagación
loss = error(outputs, labels) # Calcula error
loss.backward() # Retropropaga error
optimizer.step() # Actualiza parámetros
predicted = torch.max(outputs.data, 1)[1] # etiqueta predicha (WTA)
total += len(labels) # número total de etiquetas en lote
correct += (predicted == labels).sum() # número de predicciones correctas
# calcula el desempeño en entrenamiento: Precisión (accuracy)
accuracy = float(correct) / float(total)
# almacena la evaluación de desempeño
iteration_list.append(epoch)
loss_list.append(loss.item())
accuracy_list.append(accuracy)
# - - - - - - - - - - - - - - -
# Evalúa la predicción en lotes cada época
# - - - - - - - - - - - - - - -
correct = 0
total = 0
for images, labels in test_loader:
if use_cuda:
images, labels = images.cuda(), labels.cuda()
images = Variable(images) # Define variables
labels = Variable(labels)
outputs = model(images) # inferencia
predicted = torch.max(outputs.data, 1)[1] # etiqueta predicha (WTA)
total += len(labels) # número total de etiquetas en lote
correct += (predicted == labels).sum() # número de predicciones correctas
# calcula el desempeño: Precisión (accuracy)
accuracy_val = float(correct) / float(total)
accuracy_list_val.append(accuracy_val)
# - - - - - - - - - - - - - - -
# Despliega evaluación
# - - - - - - - - - - - - - - -
print('Epoch: {:02} Loss: {:.6f} Accuracy: {:.6f} Accuracy Val: {:.6f}'.format(epoch, loss.data, accuracy, accuracy_val))
Epoch: 00 Loss: 0.648598 Accuracy: 0.545467 Accuracy Val: 0.811200
Epoch: 01 Loss: 0.392635 Accuracy: 0.858867 Accuracy Val: 0.885400
Epoch: 02 Loss: 0.367481 Accuracy: 0.894383 Accuracy Val: 0.904100
Epoch: 03 Loss: 0.439114 Accuracy: 0.907967 Accuracy Val: 0.916200
...
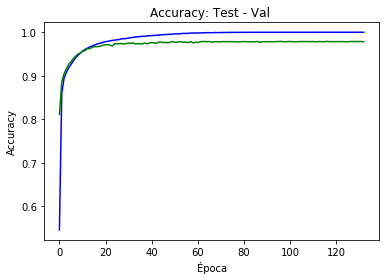
Epoch: 131 Loss: 0.000622 Accuracy: 1.000000 Accuracy Val: 0.978500
Epoch: 132 Loss: 0.000812 Accuracy: 1.000000 Accuracy Val: 0.978400
Visualización
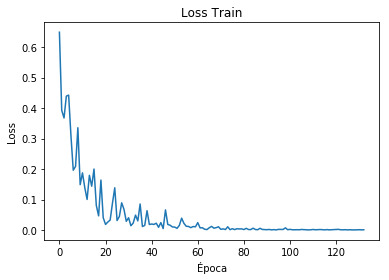
# Loss
plt.plot(iteration_list,loss_list)
plt.xlabel("Época")
plt.ylabel("Loss")
plt.title("Loss Train")
plt.show()
# Accuracy
plt.plot(iteration_list,accuracy_list,'b')
plt.plot(iteration_list,accuracy_list_val, 'g')
plt.xlabel("Época")
plt.ylabel("Accuracy")
plt.title("Accuracy: Test - Val ")
plt.show()