I am generally interested in a wide variety of topics in the robotics, control, and machine learning communities. Currently I am working on my doctoral thesis project which is related to: Robot Motion Planning and Map Building.
Planning Exploration Strategies Under Uncertainty
A robot's knowledge about the state of the world (including the robot itself) derives from two sources: the actions that the robot performs, and the data it obtains using its sensors.
An overview of the main projects is given below.
Map Building
|
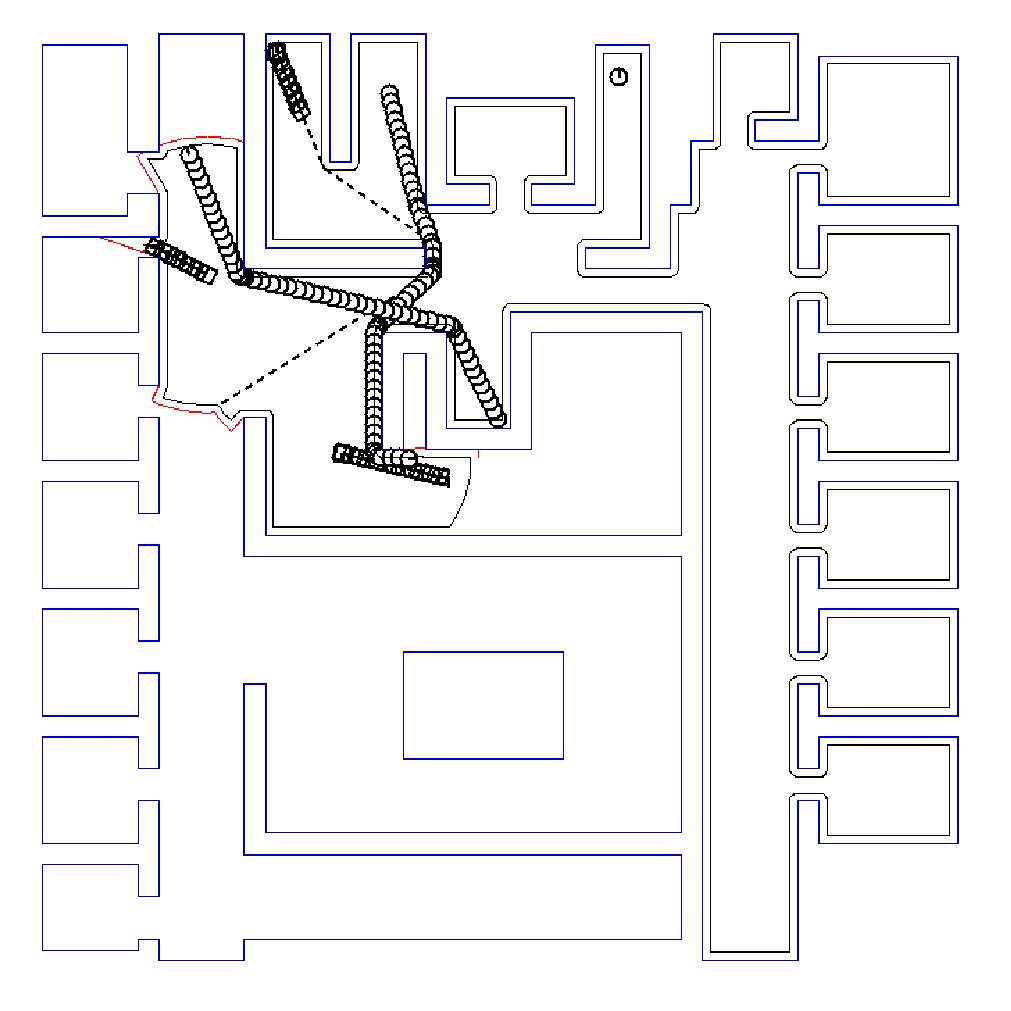
In this work, we present a multi-robot exploration strategy for map-building.
We consider an indoor structured environment and a team of robots with different
sensing and motion capabilities.
Since, we assume uncertainty in both sensing and control, we model our problem as a dynamic system with imperfect state information. Our modeling can be considered as a Partially-Observable Markov Decision Process (POMDP), which is optimized using Stochastic Dynamic Programming |
Object Finding
|
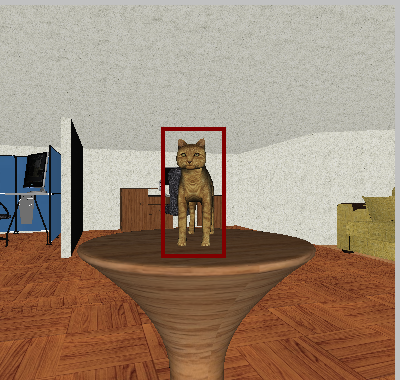
In this work, we proposed an approach to confirm
the detection of a given target with a mobile robot equipped
with a vision sensor.
The main novelty of this work is to propose an approach that combines the localization of the robot relative to an object believed to be the target and confirmation of this object's identity. Our modelling is based on a relative appearance map, which is constructed relatively to the target's location. The target confirmation problem is modeled as a Partially- Observable Markov Decision Process (POMDP), which is solved using Stochastic Dynamic Programming (SDP). |