Visual Servoing for Mobile Robots

Singularity-free Visual Servoing 
A novel
approach for visual control of wheeled mobile robots has been proposed,
extending the existing works that use the trifocal tensor as
source for measurements. In this approach, singularities typically
encountered in this kind of methods are removed by formulating the
control problem based on the trifocal tensor and by using a virtual
target vertical translated from the real target. 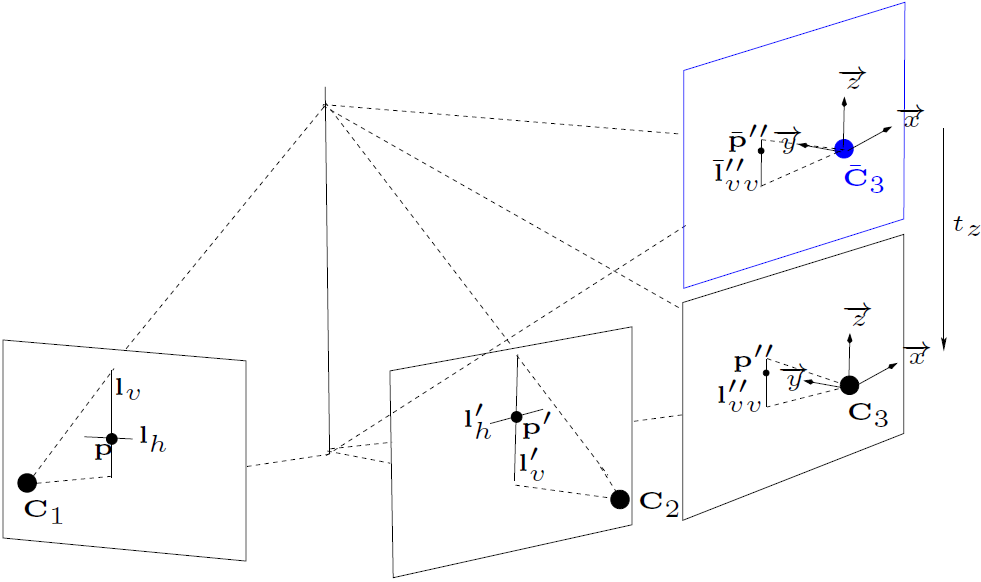
A single controller able to regulate the robot pose towards the desired configuration without local minima is designed. Additionally, the proposed approach is valid for perspective cameras as well as catadioptric systems obeying a central camera model.
- H. M. Becerra, J.B. Hayet and C. Sagüés, "A Single Visual‐Servo Controller of Mobile Robots with Super‐Twisting Control", Robotics and Autonomous Systems, accepted, March 2014.
- H. M. Becerra, J. B. Hayet and C Sagüés, “Virtual target formulation for singularity-free visual control using the trifocal tensor,” Lecture Notes in Computer Science 7914, Proc. of 5th Mexican Conference on Pattern Recognition (MCPR'13), J.A. Carrasco-Ochoa et al. (Eds.), Springer-Verlag, pp. 30--39, 2013. pdf
Pose-Estimation-Based Visual Servoing
We
propose a new visual servoing scheme based on pose-estimation to drive
mobile robots to a desired location specified by a target image. Our
scheme recovers the camera
location (position and orientation) using an Extended Kalman Filter
(EKF) algorithm with the 1D trifocal tensor (TT) or the epipolar geometry as measurement model.
A state-estimated feedback control law is
designed to solve a tracking problem for the lateral and longitudinal
robot coordinates. The desired trajectories to be tracked ensure total
correction of both position and orientation using a single step control
law, although the orientation is a DOF in the control system. 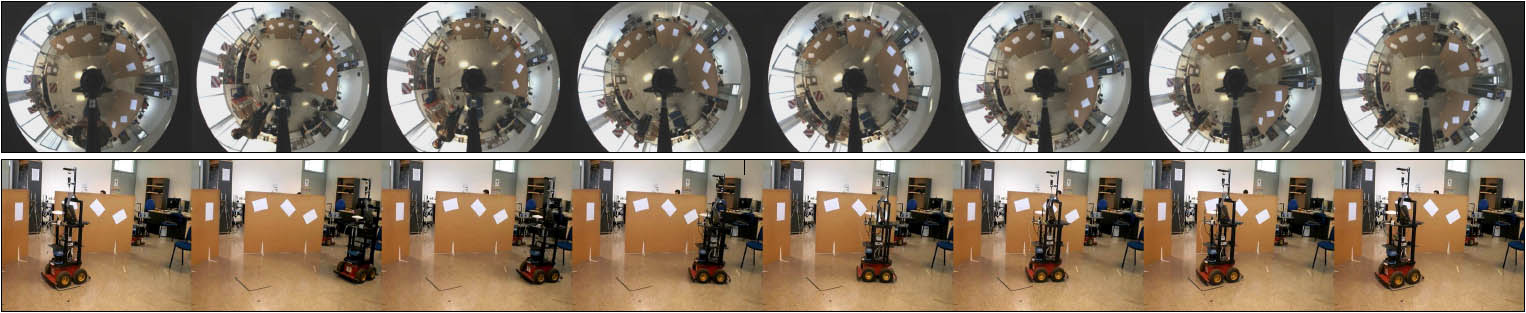
The interest of this approach is that the new visual servoing scheme allows knowing the real world path performed by the robot without the computational load introduced by position-based approaches. The effectiveness of our approach is tested via simulations and real-world experiments using a hypercatadioptric imaging system.
 1. Simulation of the pose-estimation-based control. 1. Simulation of the pose-estimation-based control. | 2. Real-world experiment of the pose-estimation-based control. |
- H. M. Becerra and C. Sagüés, "Exploiting the Trifocal Tensor in Dynamic Pose Estimation for Visual Control," IEEE Transactions on Control Systems Technology, Vol. 21, No. 5, pages 1931--1939, September 2013. pdf
- H. M. Becerra and C. Sagüés, “Dynamic Pose-Estimation from the Epipolar Geometry for Visual Servoing of Mobile Robots,” IEEE International Conference on Robotics and Automation (ICRA'11), pp. 417--422, Shanghai, China, May 2011. pdf
- H. M. Becerra and C. Sagüés, “Pose-Estimation-Based Visual Servoing for Differential-Drive Robots using the 1D Trifocal Tensor,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'09), pp. 5942--5947, St. Louis, MO, USA, October 2009. pdf
1D Trifocal Tensor-Based Visual Servoing
We
have
introduced an image-based approach to perform visual control for
wheeled mobile robots using for the first time the elements of the
1D trifocal tensor directly in the control law. The visual control
utilizes the usual teach-by-showing strategy without requiring any a
prior knowledge of the scene and does not need any auxiliary image.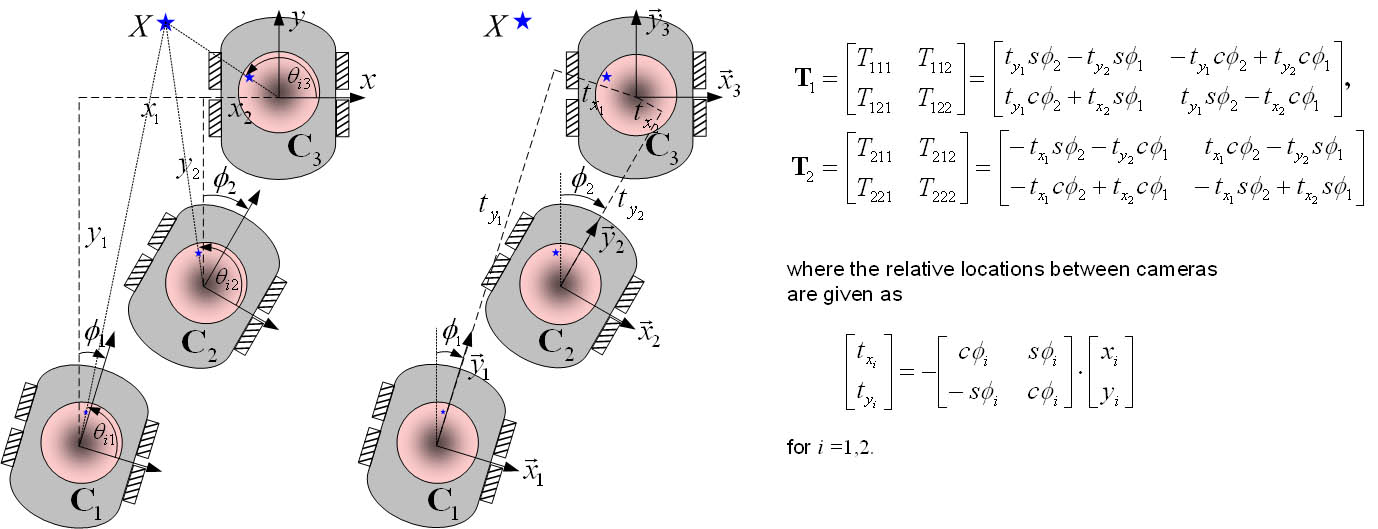
| 1. Simulation of the trifocal tensor-based control. | 2. Real-world experiment of the trifocal tensor-based control. |
- H. M. Becerra, G. López-Nicolás and C. Sagüés, "Omnidirectional Visual Control of Mobile Robots based on the 1D Trifocal Tensor," Robotics and Autonomous Systems, Vol. 58, Issue 6, pages 796--808, June 2010. pdf
- H. M. Becerra and C. Sagüés, “A Novel 1D Trifocal Tensor-Based Control for Differential-Drive Robots,” IEEE International Conference on Robotics and Automation (ICRA'09), pp. 1104--1109, Kobe, Japan, May 2009. pdf
Epipolar-Based Visual Servoing
We
have proposed a novel control law based on sliding mode theory in order to
perform visual servoing for mobile robots. The control law exploits the
epipolar geometry extended to three views on the basis of image-based
visual servoing. The control strategy is performed in two steps. The
first step achieves total correction of both orientation and lateral
error, while in a second step depth correction is performed.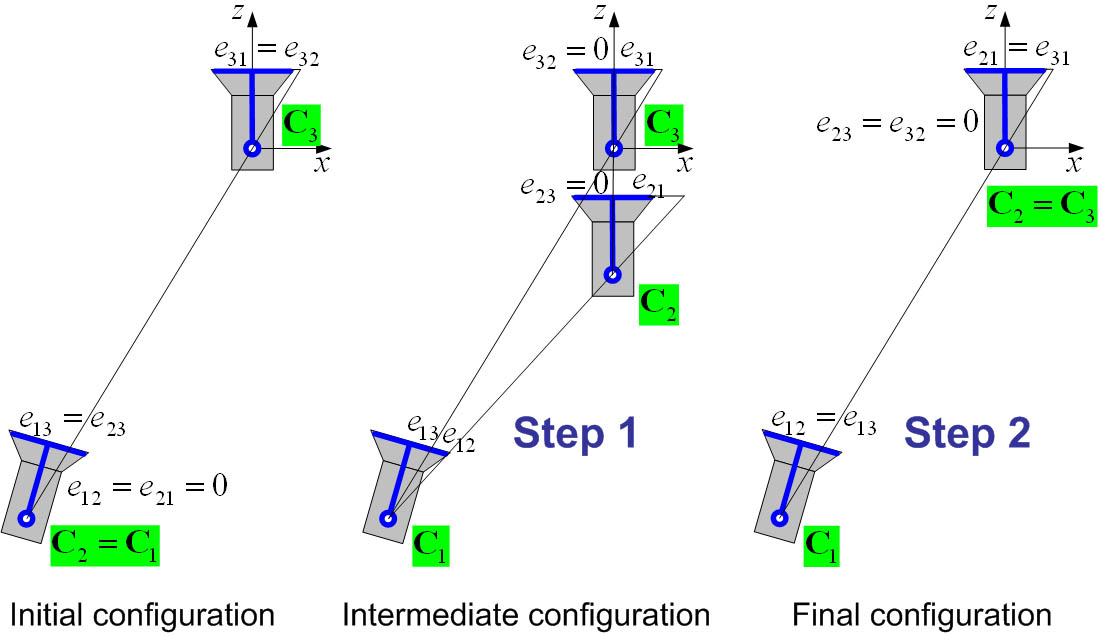
| 1. Simulation of the robust epipolar-based control. | 2. Real-world experiment of the robust epipolar-based control. |
- H. M. Becerra, G. López-Nicolás and C. Sagüés, "A Sliding Mode Control Law for Mobile Robots based on Epipolar Visual Servoing from Three Views," IEEE Transactions on Robotics, Vol. 27, No. 1, pages 175--183, February 2011. pdf
- H. M. Becerra and C. Sagüés, “Sliding Mode Control for Visual Servoing of Mobile Robots using a Generic Camera,” Chapter 12, Sliding Mode Control, A. Bartoszewicz (Ed.), ISBN 978-953-307-162-6, INTECH, pp. 221--236, April 2011. pdf
- H. M. Becerra and C. Sagüés, “A Sliding Mode Control Law for Epipolar
Visual Servoing of Differential-Drive Robots,” IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS'08), pp. 3058--3063,