A
visual path following control scheme for wheeled mobile robots based on
a geometric constraint has been proposed. The control law only requires
one measurement easily computed from the image data through the
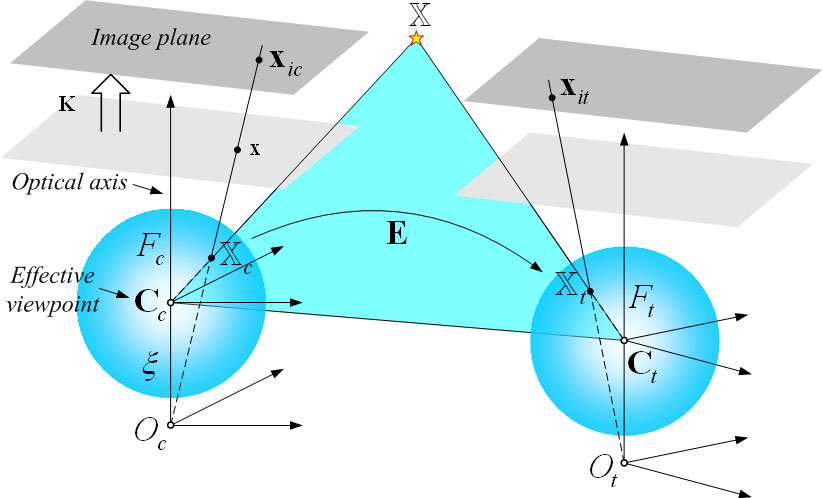
geometric constraints: the epipolar geometry or the trifocal tensor. Our approach is valid for all cameras
obeying the unified model, including conventional, central catadioptric
and some fisheye cameras.
The
proposed approach has two main advantages: explicit pose parameters
decomposition is not required and the rotational velocity is smooth or
eventually piece-wise constant avoiding discontinuities that generally
appear when the target image changes. The translational velocity is
adapted as required for the path and the approach is independent of
this velocity.

 1. Simulation of the visual navigation scheme.
1. Simulation of the visual navigation scheme.