

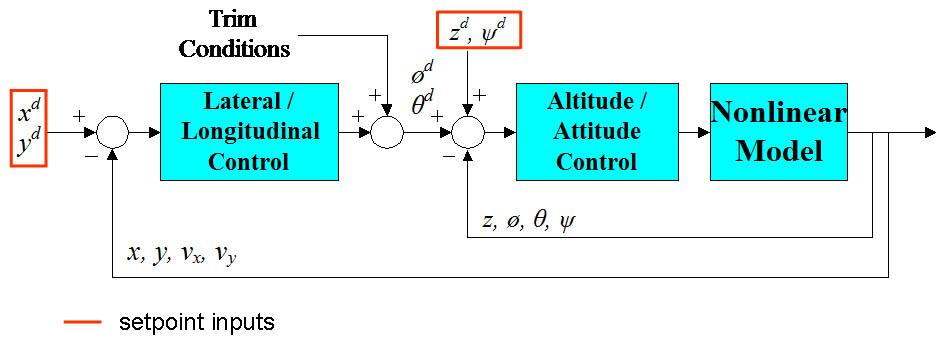
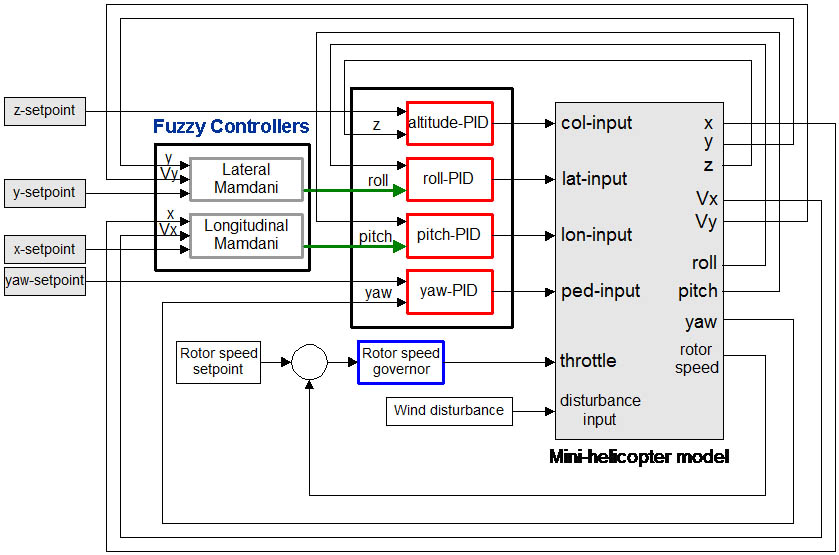
I have worked on the synthesis of different flight controllers for an X-Cell mini-helicopter. These controllers are developed on the basis of the most realistic mathematical model currently available. Two hybrid intelligent control systems, combining computational intelligence methodologies with other control techniques, are investigated. For both systems, Mamdani-type fuzzy controllers determine the set points for altitude/attitude control. These fuzzy controllers are designed using a simple rule base.
The first scheme consists of conventional SISO PID controllers for z-position and roll, pitch and yaw angles.
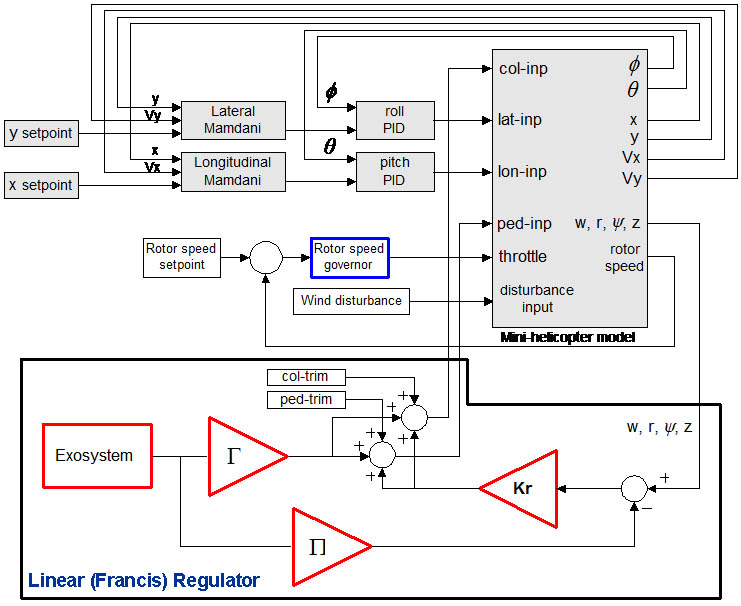
In the second scheme, two of the previous PID controllers are used for roll and pitch, and a linear regulator is added to control altitude and yaw angle.
These control schemes mimic the action of an expert pilot. It is shown that the designed controllers exhibit good performance for hover flight and control positioning at slow speed.
Tracking of a sinusoidal reference for altitude