Bicycling mathematics
By: Gil Bor, CIMAT, gil@cimat.mx(Under construction. Last modified: .)
Definitions. A pair of parametrized curves $(\mathbf{b}(t), \mathbf{f}(t))$ in $\mathbb R^2$ is a bicycle path if (1) $\|\mathbf{b}(t)- \mathbf{f}(t)\|=\ell$ (a constant, the 'bicycle length'), and (2) $\dot{\mathbf{b}} \| (\mathbf{b}-\mathbf{f})$ at all times (the 'no skid' condition). For a given (smooth) $\mathbf{f}(t)$ one can write $\mathbf{b}=\mathbf{f}+\ell\mathbf{r}$, with $\mathbf{r}(t)\in S^1$, then the above is equivalent to $\ell\dot{\mathbf{r}}=-\dot{\mathbf{f}}+(\mathbf{r}\cdot\dot{\mathbf{f}}) \mathbf{r}$ (the 'bicycle eqn'). The flow of this ODE, over some segment of the front track $\mathbf{f}(t)$, defines a circle map, which turns out to be an element of $\mathrm{PSL}_2(\mathbb{R})$ (a Mobius transformation), called the bicycling monodromy of the front track (esp when it is closed).
The bicycling eqn makes sense also in $\mathbb{R}^{n}$, where $\mathbf{r}\in S^{n-1}$ and where the monodromy $S^{n-1}\to S^{n-1}$ is a Mobius (or conformal) transformation. In case $n=3$ the Mobius group is $\mathrm{PSL}_2(\mathbb{C}).$
Bicycling geodesics. Define the length of a bike path to be the length of the front track. What are the bicycling geodesics? (paths of shortest length, between some two fixed configurations). Answer: the front track is a non-inflectional Euler's elasicae.
Gallery
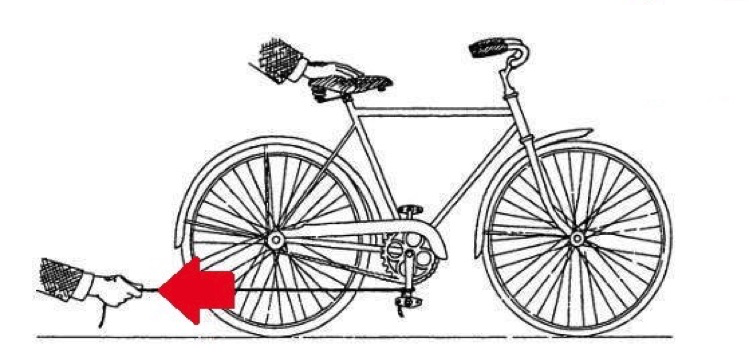
Which way will the the bicycle move if we pull on the pedal? (solution here, but think 1st!) |

Non intuitive behavior |
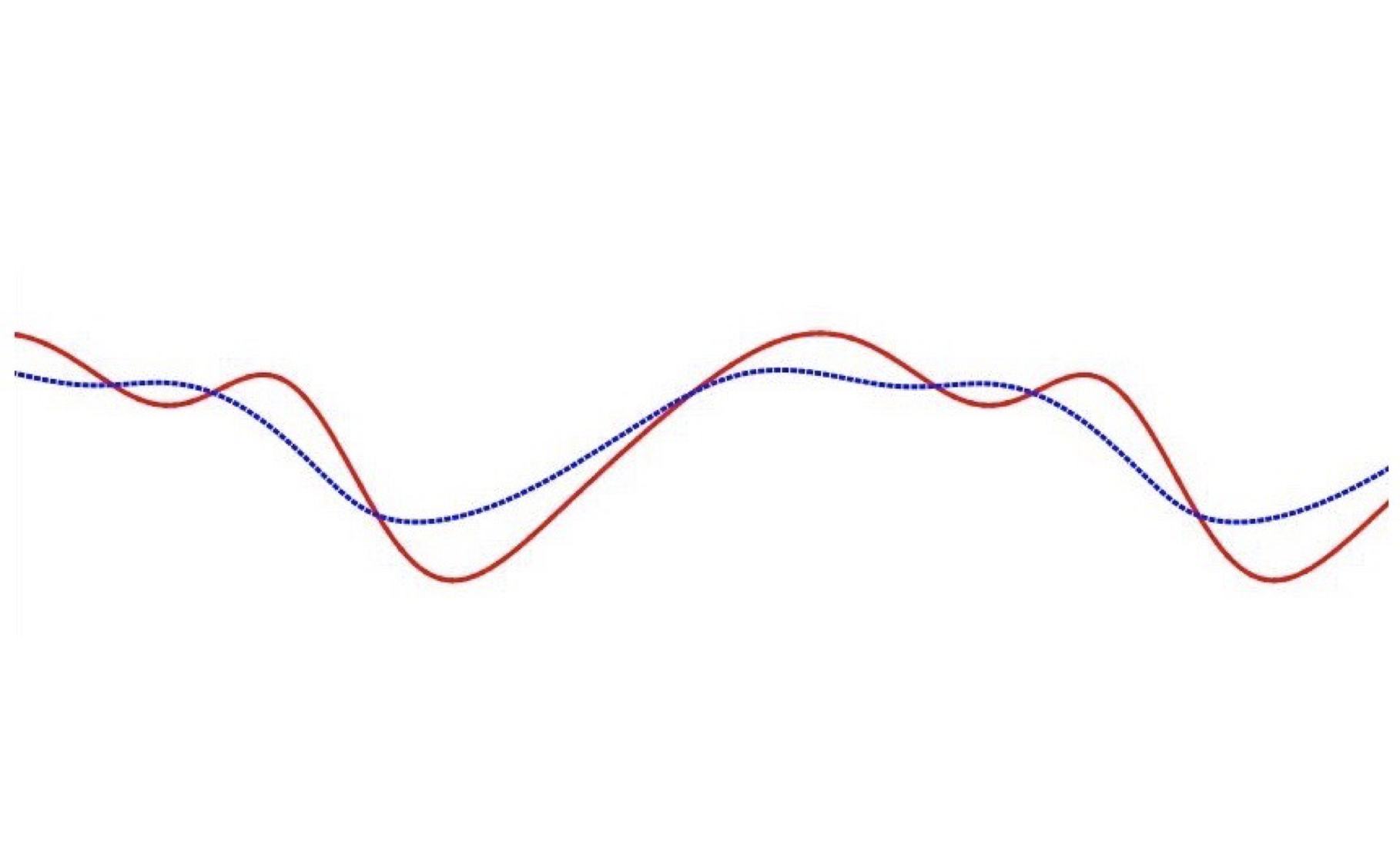
Which way did the bicycle go? |
Bicycle correspondence |
The tractrix |
Prytz planimeter |
Parabolic monodromy |
Hyperbolic monodromy |
A 4-fold circle with trivial monodromy |
3D bicycling |
A 'wide' bicycling geodesic |
A 'narrow' bicycling geodesic |
Euler's soliton |
Flipping a narrow geodesic |
Flipping a wide geodesic |