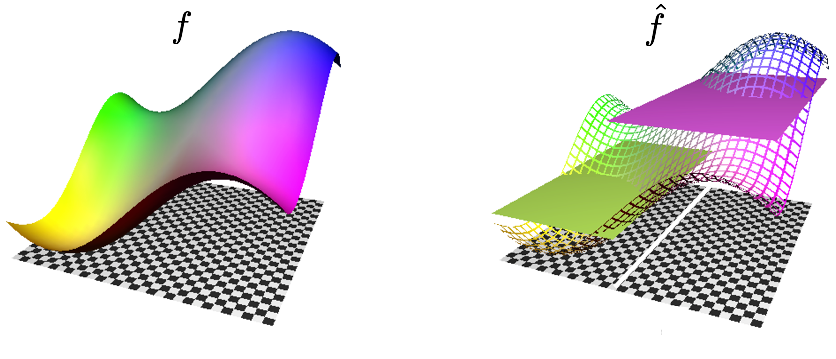
Fig 1. Función objetivo a modelar (izquierda) y un modelo basado en medias locales (derecha)
Esta presentación introduce dos métodos para aprender/aproximar funciones: (1) Classification and Regression Trees (CARTs) y (2) Convex Partition (CP). Ambos están basados en árboles y comparten el mismo esquema algorítmico, que consiste en dividir progresivamente el dominio en subconjuntos que mapean a valores más homogéneos (Fig. 1).
La única diferencia entre CART y CP es el criterio utilizado para seleccionar el siguiente subconjunto a explorar y partir. CART explora y modela las regiones de mayor incertidumbre, lo que reduce el error entre el modelo (árbol) y la función original. Por otro lado, CP prioriza los subconjuntos que tienen potencial de contener el óptimo global. El algoritmo CP ha sido utilizado con éxito como un método de black-box optimization.